




Essential Embedded Firmware Interview Preparation Tips
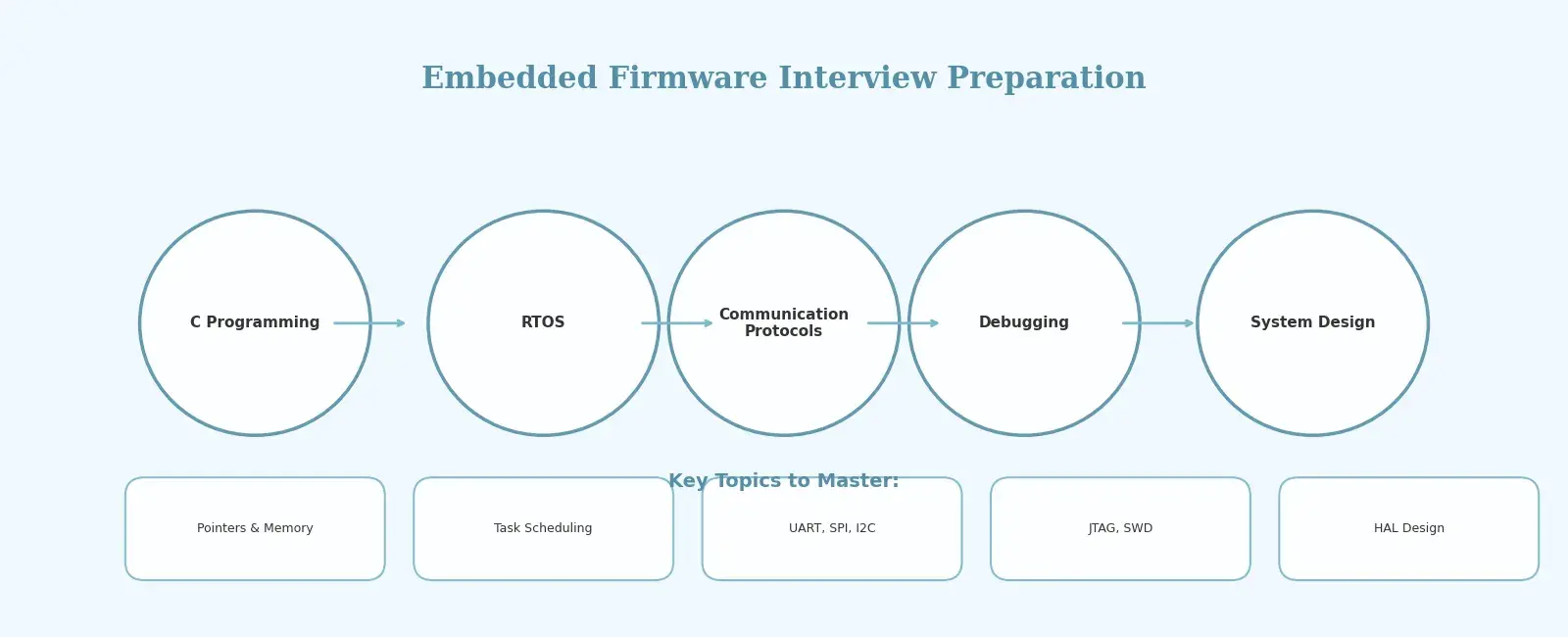
Table Of Contents
Preparing for embedded firmware interviews requires a strategic approach that covers both fundamental concepts and practical skills. Here’s your comprehensive guide to acing embedded firmware interviews.
Master the C Programming Foundation
C remains the lingua franca of embedded systems. Interviewers will probe your understanding deeply:
Memory Management:
- Pointer arithmetic and pointer-to-pointer concepts
- Memory layout (stack vs heap vs static vs code sections)
- Dynamic memory allocation pitfalls (malloc/free, memory leaks)
- Volatile keyword usage and when it’s actually needed
Data Structures:
- Implementing linked lists, queues, and circular buffers in C
- Function pointers and callback mechanisms
- Bit manipulation for register-level programming
- Structure packing and padding considerations
Modern C Practices:
- Using const correctly (const pointer vs pointer to const)
- Understanding const correctness in function parameters
- Inline functions vs macros trade-offs
- Static analysis tools (lint, cppcheck, clang-tidy)
RTOS Concepts That Actually Matter
Most embedded roles use FreeRTOS or Zephyr. Know these inside out:
Task Management:
- Task states (ready, running, blocked, suspended)
- Context switching mechanics and stack requirements
- Priority inversion and priority inheritance protocols
- Task notification vs semaphores vs queues for communication
Synchronization Primitives:
- Binary semaphores vs mutexes (know the difference!)
- Counting semaphores for resource management
- Queue sets for handling multiple queue waits
- Software timers and their use cases
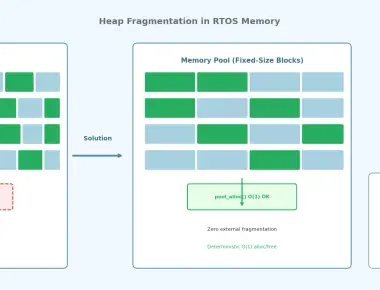
Advanced Topics:
- Memory allocation schemes (heap_1, heap_2, heap_3, heap_4)
- Stack overflow detection and monitoring
- Interrupt service routines and deferring work to tasks
- Tickless idle mode for power-sensitive applications
Communication Protocols - Beyond the Basics
Interviewers love to ask about UART, SPI, I2C, and CAN:
UART:
- Baud rate calculation and error tolerance
- Flow control (hardware RTS/CTS vs software XON/XOFF)
- DMA vs interrupt-driven reception
- Multi-processor mode and address detection
SPI:
- Clock polarity and phase (CPOL, CPHA) configurations
- Daisy-chaining vs independent slave select
- DMA for high-speed data transfer
- SPI in slave mode implementation considerations
I2C:
- Clock stretching and bus arbitration
- Multi-master scenarios and collision avoidance
- 7-bit vs 10-bit addressing
- Repeated start conditions and their importance
CAN Protocol:
- Bit stuffing and NRZ encoding
- Error frames and error confinement
- Standard vs extended frame formats
- CAN FD vs classic CAN differences
Debugging Skills That Get You Hired
Your debugging approach reveals your experience level:
Hardware Debugging:
- JTAG/SWD connection and target voltage considerations
- Breakpoint types (hardware vs software) and limitations
- Watchpoints for monitoring memory access
- Trace capabilities (ETM, ITM, SWO) for performance analysis
Software Debugging:
- Logic analyzers vs oscilloscopes for protocol debugging
- printf debugging pitfalls in real-time systems
- Circular buffers for logging in ISR-safe manner
- Assertions and defensive programming techniques
Advanced Techniques:
- Post-mortem debugging with crash dumps
- Fault handlers (HardFault, MemManage, BusFault)
- Runtime error detection (stack overflow, null pointers)
- Power consumption profiling and optimization
System Design Questions
Senior roles expect system design thinking:
Architecture Decisions:
- Bare-metal vs RTOS vs Linux trade-offs
- Layered architecture (HAL, BSP, application layers)
- Event-driven vs polling-based architectures
- State machine implementation approaches
Resource Constraints:
- Memory budgeting (RAM vs ROM vs stack)
- CPU utilization calculations for RTOS systems
- Power budgeting and low-power modes
- Thermal considerations and derating
Reliability and Safety:
- Watchdog timer implementation and testing
- Stack overflow detection mechanisms
- Memory protection units (MPU) usage
- Error detection and correction strategies
Interview Preparation Strategy
Week 1-2: Fundamentals Refresh
- Re-read “Embedded C” by Michael Pont
- Review RTOS concepts with FreeRTOS documentation
- Practice pointer-heavy coding exercises daily
Week 3-4: Protocol Deep Dive
- Implement UART driver with DMA from scratch
- Build I2C scanner for multi-device detection
- Create SPI master/slave communication between two boards
Week 5-6: System Integration
- Combine multiple sensors (IMU, temperature, pressure) on I2C
- Implement command protocol over UART for configuration
- Add logging with circular buffer and fault detection
Week 7-8: Mock Interviews
- Practice explaining concepts out loud (critical!)
- Whiteboard coding exercises for linked lists, queues
- System design: “Design a motor controller with fault detection”
- Behavioral: “Tell me about a time you debugged a hard fault”
Final Tips
- Speak clearly when explaining - Communication matters as much as technical skill
- Ask thoughtful questions about their development process, tools, challenges
- Follow up the recruiter with a thank-you note
- Stay current with new MCU features and development tools
Remember: Embedded interviews test both depth and breadth. Know your fundamentals cold, but also show you can think systemically. Good luck!
Previous Article
Understanding the volatile Keyword in Embedded CNext Article
RTOS Concepts - Tasks, Semaphores, and MutexesRelated Posts

RTOS Concepts - Tasks, Semaphores, and Mutexes
May 09, 2026
3 min

Bit Manipulation Masterclass for Embedded C Interviews
May 06, 2026
2 min

Efficiently Finding the Middle of a Linked List in C
May 06, 2026
1 min

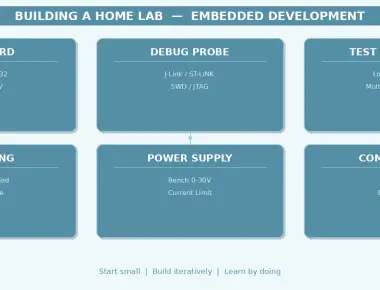
Building a Home Lab for Embedded Development
June 23, 2026
4 min
Quick Links
Legal Stuff