


Rate Monotonic Scheduling and Schedulability Analysis in RTOS
June 22, 2026
5 min
Interrupts are fundamental to embedded systems, allowing microcontrollers to respond promptly to external events while maintaining efficient CPU utilization. An Interrupt Service Routine (ISR) is a special function that executes when an interrupt occurs, handling time-critical tasks without blocking the main program flow.
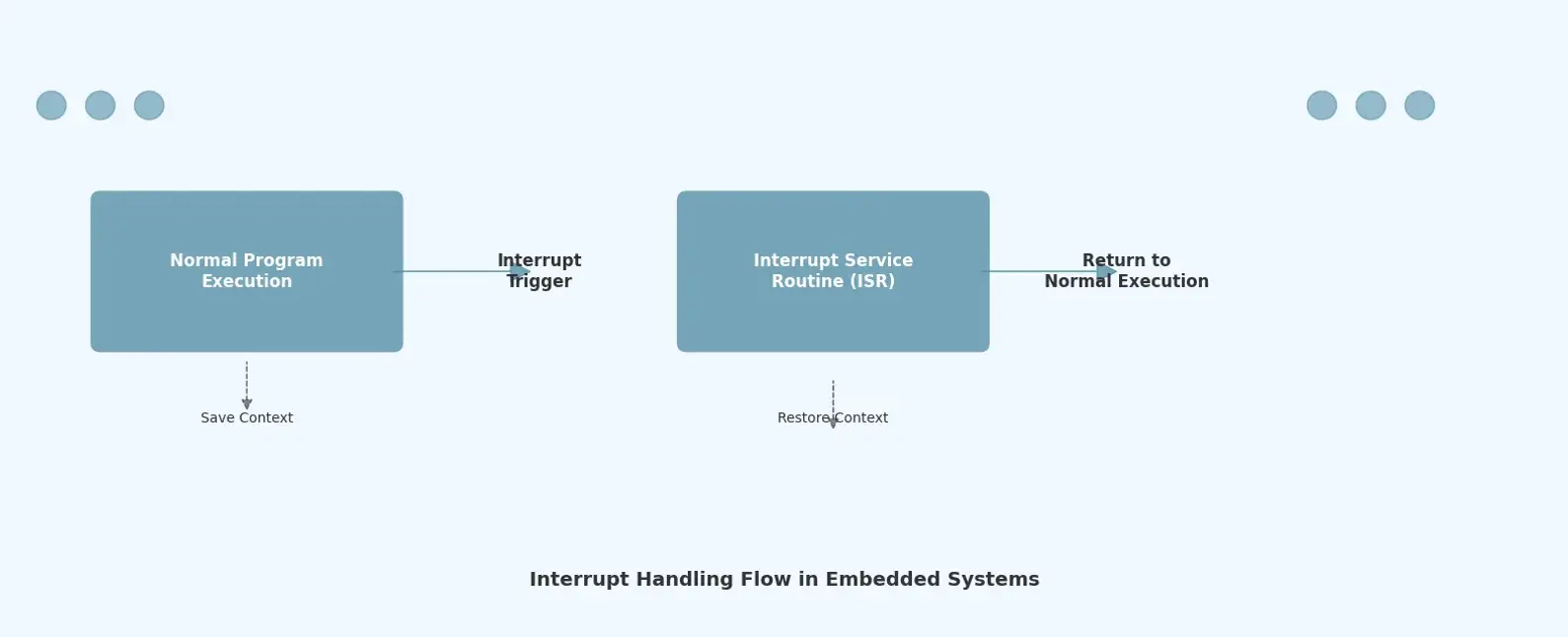
In bare-metal embedded systems, interrupts provide a mechanism for the processor to temporarily halt normal execution when a peripheral device requires attention. When an interrupt triggers, the CPU saves its current state, jumps to the ISR, processes the interrupt, and then restores the previous state to resume normal execution. This mechanism is crucial for real-time responsiveness in applications ranging from sensor data acquisition to communication protocols.
The effectiveness of an interrupt system depends heavily on proper ISR design. ISRs should be kept as short as possible to minimize interrupt latency and prevent blocking other interrupts. Long-running operations within an ISR can cause missed interrupts and system instability. Best practices dictate that ISRs should only perform essential tasks like reading sensor data, setting flags, or triggering DMA transfers, while deferring complex processing to the main application loop.
Modern Real-Time Operating Systems (RTOS) add layers of complexity to interrupt handling. In RTOS environments, ISRs often interact with kernel services through specialized APIs that are safe to call from interrupt context. These services might include sending messages to queues, setting semaphores, or triggering task switches. The RTOS kernel manages interrupt nesting and ensures that critical sections are properly protected.
Interrupt prioritization is another critical aspect of embedded interrupt systems. Most microcontrollers support multiple interrupt priority levels, allowing designers to ensure that the most critical interrupts (like watchdog timers or fault detectors) can preempt less critical ones.
Nested interrupts occur when a higher-priority interrupt interrupts an already executing ISR. While some architectures support nested interrupts by default, others require explicit configuration. Handling nested interrupts correctly requires careful consideration of stack usage and register preservation to avoid corruption of the interrupted ISR’s context.
Interrupt latency – the time between an interrupt trigger and the start of ISR execution – is a key performance metric in real-time systems. Factors affecting latency include interrupt synchronization, priority resolution, and the time needed to save processor context. Deterministic low-latency interrupt response is essential for applications like motor control, digital signal processing, and communication interfaces where timing jitter must be minimized.
Debugging interrupt-related issues presents unique challenges due to their asynchronous nature. Common problems include missed interrupts, spurious interrupts, and ISR execution taking too long. Effective debugging strategies involve using hardware breakpoints in ISRs, monitoring interrupt counts, and analyzing timing with oscilloscopes or logic analyzers to correlate interrupt events with system behavior.
Power consumption considerations also influence interrupt system design. Many microcontrollers use interrupts to wake from low-power sleep modes, enabling energy-efficient operation in battery-powered devices. Configuring which interrupts can wake the system and ensuring proper peripheral configuration before entering sleep modes are critical for reliable low-power operation.
Designing effective ISRs requires adherence to several key principles that ensure system reliability and responsiveness.
First and foremost, ISRs must be deterministic. The execution time should be predictable and bounded, as jitter in ISR execution can disrupt real-time guarantees. This means avoiding loops with variable iteration counts, dynamic memory allocation, or any operations that could cause unpredictable delays.
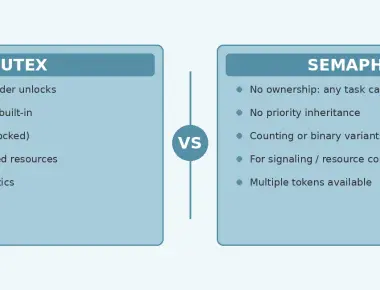
Second, ISRs should minimize shared resource access. When ISRs need to share data with the main application or other ISRs, proper synchronization mechanisms must be employed. This often involves using atomic operations, disabling interrupts during critical sections, or using lock-free data structures designed for concurrent access.
Third, ISRs should avoid calling functions that are not interrupt-safe. Many library functions, particularly those involving dynamic memory allocation or complex data structures, are not designed to be called from interrupt context. Calling such functions from an ISR can lead to corruption, deadlocks, or other unpredictable behavior.
Fourth, ISRs should clear interrupt flags promptly. Failing to clear the interrupt source flag can cause the same interrupt to trigger repeatedly, leading to interrupt storms that consume all available CPU time. The timing of flag clearing is critical: on modern processors like ARM Cortex-M, writes to peripheral registers are buffered. If the flag is cleared at the very end of the ISR, the write may not have completed before the exception return executes, causing the NVIC to immediately re-trigger the same interrupt (a false double-entry). To prevent this, the flag should either be cleared at the very beginning of the ISR, or developers must perform a read-back of the register (or execute a __DSB() barrier) at the end of the ISR to force the write to complete before exiting.
Fifth, ISRs should use the minimum stack space necessary. Excessive stack usage in ISRs can lead to stack overflow, especially in systems with limited memory. This is particularly important in nested interrupt scenarios where multiple ISRs may be active simultaneously.
When using a Real-Time Operating System, interrupt handling becomes more sophisticated due to the presence of kernel services and task management.
Most RTOS kernels provide special APIs for ISR-to-task communication. These APIs are designed to be called from interrupt context and typically include functions for sending data to queues, setting semaphores, or giving event flags. These mechanisms allow ISRs to quickly capture time-sensitive data and defer processing to appropriate task contexts.
Interrupt nesting behavior varies between RTOS implementations. Some kernels fully support nested interrupts, allowing higher-priority interrupts to preempt lower-priority ISRs. Others disable interrupts during ISR execution to simplify kernel design. Understanding the specific nesting behavior of your RTOS is crucial for designing appropriate interrupt handlers.
The RTOS kernel often manages context switching decisions based on ISR activity. For example, if an ISR makes a high-priority task ready to run, the kernel may decide to perform a context switch upon ISR exit rather than returning to the interrupted task. This ensures that urgent tasks are scheduled promptly after interrupt processing.
Effective interrupt handling is a cornerstone of reliable embedded system design. By understanding the fundamentals of interrupt mechanics, following ISR design best practices, considering RTOS-specific requirements, and applying performance optimization techniques, developers can create responsive and deterministic embedded systems.
The key principles to remember are: keep ISRs short and deterministic, prioritize interrupts appropriately, use proper synchronization for shared data, clear interrupt flags promptly, and leverage hardware features like DMA to minimize CPU overhead. With these practices in place, interrupt systems can provide the real-time responsiveness needed for demanding embedded applications while maintaining system stability and reliability.
Quick Links
Legal Stuff