


Rate Monotonic Priority Ceiling Protocol Fixes Priority Inversion
July 10, 2026
4 min
In any multi-tasking embedded system, tasks frequently compete for shared resources such as peripherals, memory buffers, and communication interfaces. Without proper synchronization, this competition leads to one of the most dreaded problems in real-time systems: deadlock. A deadlock occurs when two or more tasks are permanently blocked, each waiting for a resource held by the other, creating a circular dependency from which no task can escape.
Understanding and preventing deadlocks is essential for building reliable RTOS-based firmware. Unlike general-purpose operating systems where a deadlock might cause an application hang, in embedded and safety-critical systems a deadlock can mean missed deadlines, system failure, or even physical harm. This article explores the classic conditions that lead to deadlock, the proven strategies used to prevent and avoid them in RTOS environments, and practical coding techniques you can apply today.
Deadlock can only occur when four conditions hold simultaneously, known as the Coffman conditions:
The key insight is that breaking any one of these four conditions is sufficient to prevent deadlock. RTOS designs typically target conditions 2, 3, or 4.
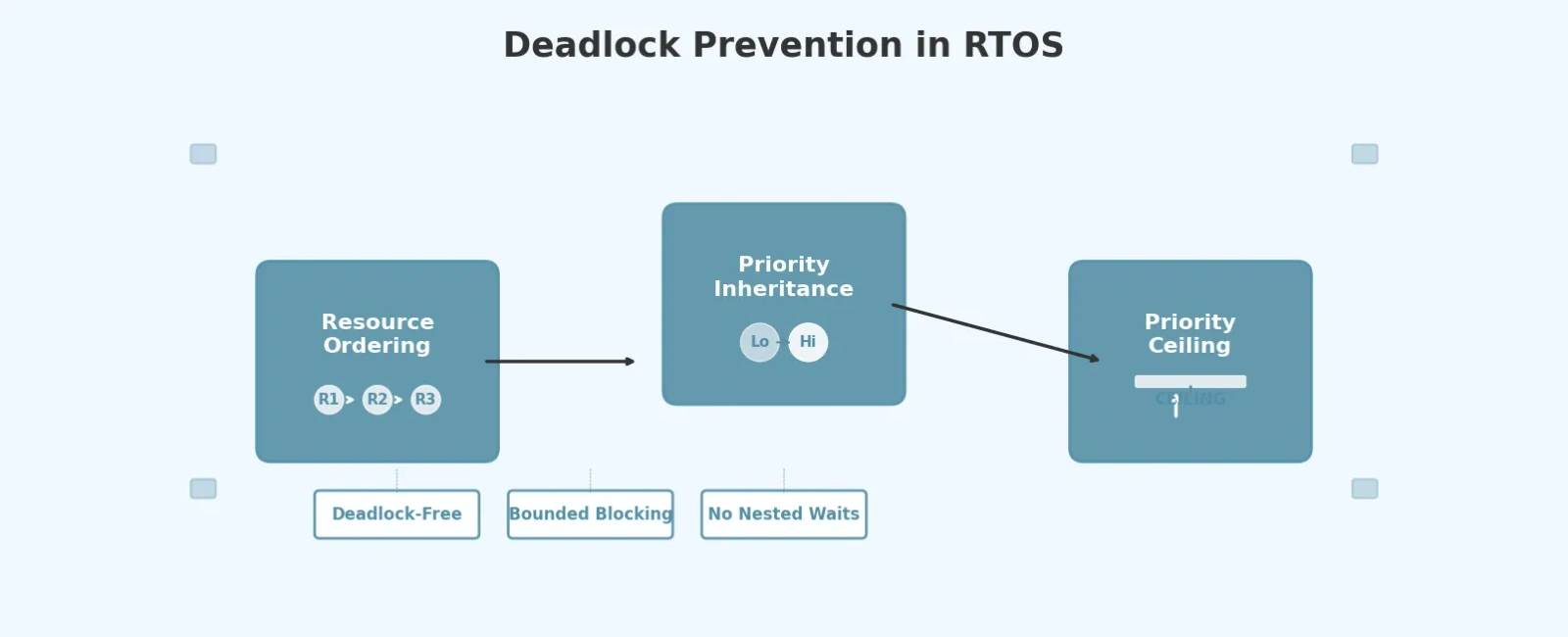
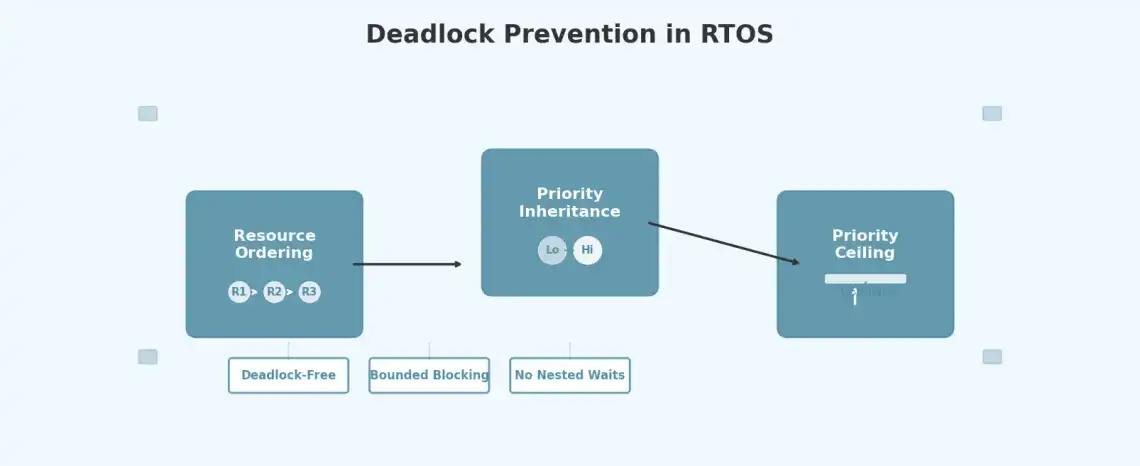
The simplest and most widely applicable technique is to impose a global ordering on all shared resources. Every task must acquire resources in the same predefined order.
/* Define resource priority order */#define RES_ORDER_UART 1#define RES_ORDER_SPI 2#define RES_ORDER_I2C 3#define RES_ORDER_FLASH 4/* All tasks MUST acquire in ascending order */void send_sensor_data(void) {mutex_lock(&spi_mutex); /* Order 2 */mutex_lock(&uart_mutex); /* Order 1 — WRONG: violates global ordering and can lead to circular wait */}/* Correct approach */void send_sensor_data_safe(void) {mutex_lock(&uart_mutex); /* Order 1 */mutex_lock(&spi_mutex); /* Order 2 *//* ... use both resources ... */mutex_unlock(&spi_mutex);mutex_unlock(&uart_mutex);}
This approach works well when the resource set is known at design time and the ordering can be enforced through code reviews and static analysis.
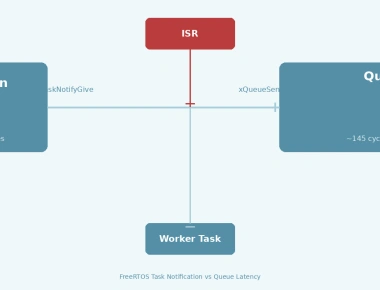
Priority inheritance is a runtime mechanism where a low-priority task holding a resource temporarily inherits the priority of any higher-priority task blocked on that same resource. This prevents unbounded priority inversion but does not eliminate deadlock, especially when multiple resources are involved.
POSIX-based RTOS implementations (including FreeRTOS with priority inheritance mutexes) support this directly:
/* FreeRTOS: Create a mutex with priority inheritance enabled */SemaphoreHandle_t xMutex = xSemaphoreCreateMutex();void high_priority_task(void *pv) {if (xSemaphoreTake(xMutex, pdMS_TO_TICKS(100)) == pdTRUE) {/* Access critical resource */access_shared_peripheral();xSemaphoreGive(xMutex);}}void low_priority_task(void *pv) {xSemaphoreTake(xMutex, portMAX_DELAY);/* While holding the mutex, if high_priority_taskattempts to take it, this task inherits HIGH priorityto finish its critical section quickly */slow_hardware_access();xSemaphoreGive(xMutex);}
Priority inheritance is the default mutex behavior in FreeRTOS, QNX, and many industrial RTOS kernels.
The Priority Ceiling Protocol, also known as the Immediate Priority Ceiling Protocol (IPCP), is a more rigorous approach that guarantees deadlock freedom and bounds blocking to at most one critical section duration per task.
Each shared resource is assigned a ceiling priority equal to the highest priority of any task that may lock that resource. When a task locks a resource, its priority is immediately raised to the ceiling priority of that resource — regardless of whether any higher-priority task is actually waiting.
/** Priority Ceiling Protocol Example** Task priorities: HIGH=3, MED=2, LOW=1* UART_MTX ceiling = 3 (highest task that uses it)* SPI_MTX ceiling = 2*/#define CEILING_UART 3#define CEILING_SPI 2typedef struct {SemaphoreHandle_t sem;uint8_t ceiling_priority;uint8_t original_priority;} ceiling_mutex_t;bool ceiling_lock(ceiling_mutex_t *m, TaskHandle_t task) {taskENTER_CRITICAL();m->original_priority = uxTaskPriorityGet(task);if (m->original_priority < m->ceiling_priority) {vTaskPrioritySet(task, m->ceiling_priority);}taskEXIT_CRITICAL();return (xSemaphoreTake(m->sem, portMAX_DELAY) == pdTRUE);}void ceiling_unlock(ceiling_mutex_t *m, TaskHandle_t task) {taskENTER_CRITICAL();if (m->original_priority < m->ceiling_priority) {vTaskPrioritySet(task, m->original_priority);}taskEXIT_CRITICAL();xSemaphoreGive(m->sem);}
Note: This is a simplified approximation of the Priority Ceiling Protocol. A full IPCP implementation requires tracking the system-wide priority ceiling and enforcing admission control rules before allowing a task to acquire a mutex.
The IPCP guarantees three critical properties:
Instead of blocking indefinitely, tasks can attempt to acquire resources with a timeout. When a task fails to acquire all needed resources within the deadline, it releases everything and retries — breaking the hold-and-wait condition.
#define TIMEOUT_MS 50bool acquire_all_or_none(void) {if (xSemaphoreTake(mtx_a, pdMS_TO_TICKS(TIMEOUT_MS)) != pdTRUE)return false;if (xSemaphoreTake(mtx_b, pdMS_TO_TICKS(TIMEOUT_MS)) != pdTRUE) {xSemaphoreGive(mtx_a); /* Release mtx_a — no hold-and-wait */return false;}if (xSemaphoreTake(mtx_c, pdMS_TO_TICKS(TIMEOUT_MS)) != pdTRUE) {xSemaphoreGive(mtx_b);xSemaphoreGive(mtx_a); /* Release all — no hold-and-wait */return false;}return true; /* All acquired */}
This pattern is especially useful in systems where deadlock avoidance must be implemented without modifying the RTOS kernel.
Care must be taken to avoid livelock, where multiple tasks repeatedly retry and fail without making progress.
Require tasks to declare all resource needs upfront and allocate them atomically. If all resources are available, the task obtains them atomically; if any one is unavailable, the task acquires none and waits until the full set becomes available.
This approach is practical for systems with a small, fixed set of predictable resource requests. Many safety-critical RTOS designs (e.g., in avionics following DO-178C) use this pattern for inter-task communication channels.
| Strategy | Deadlock Free? | Blocking Bound | Complexity |
|---|---|---|---|
| Resource Ordering | Yes | N/A | Low |
| Priority Inheritance | No* | Bounded | Medium |
| Priority Ceiling (IPCP) | Yes | Bounded (1x CS) | Medium |
| Try-Lock + Timeout | Avoids permanent deadlock (may livelock) | Timed | Low |
| All-or-Nothing | Yes | Potentially unbounded (waiting for full set) | High |
*Priority inheritance alone does not prevent deadlock with multiple resources but pairs well with resource ordering.
Deadlock prevention in RTOS environments requires both design-time discipline and runtime protocols. Resource ordering is the simplest defense. Priority inheritance bounds priority inversion with minimal runtime overhead. The Priority Ceiling Protocol offers the strongest guarantees — deadlock freedom and single-blocking bound — at moderate implementation cost. For most embedded systems, mutexes with priority inheritance combined with strict resource ordering provide an excellent balance of safety and simplicity.
Quick Links
Legal Stuff