


Rate Monotonic Priority Ceiling Protocol Fixes Priority Inversion
July 10, 2026
3 min
Imagine your highest-priority task — the one responsible for firing airbags in a car — sitting idle, waiting because a low-priority task that logs temperature data happens to hold a shared lock. This is not a hypothetical design flaw. It actually happened on Mars, causing NASA’s Pathfinder rover to repeatedly reset itself 140 million miles from Earth. The culprit was priority inversion, one of the most insidious bugs in real-time embedded systems.
Understanding priority inversion and the inheritance protocol that solves it is essential knowledge for any embedded systems engineer writing RTOS-based firmware.
In a priority-scheduled RTOS, each task is assigned a number that reflects its urgency. The scheduler always runs the highest-priority task that is ready to go. Priority inversion occurs when a high-priority task is indefinitely blocked by a lower-priority task — a situation that shouldn’t happen if priorities worked exactly as intended.
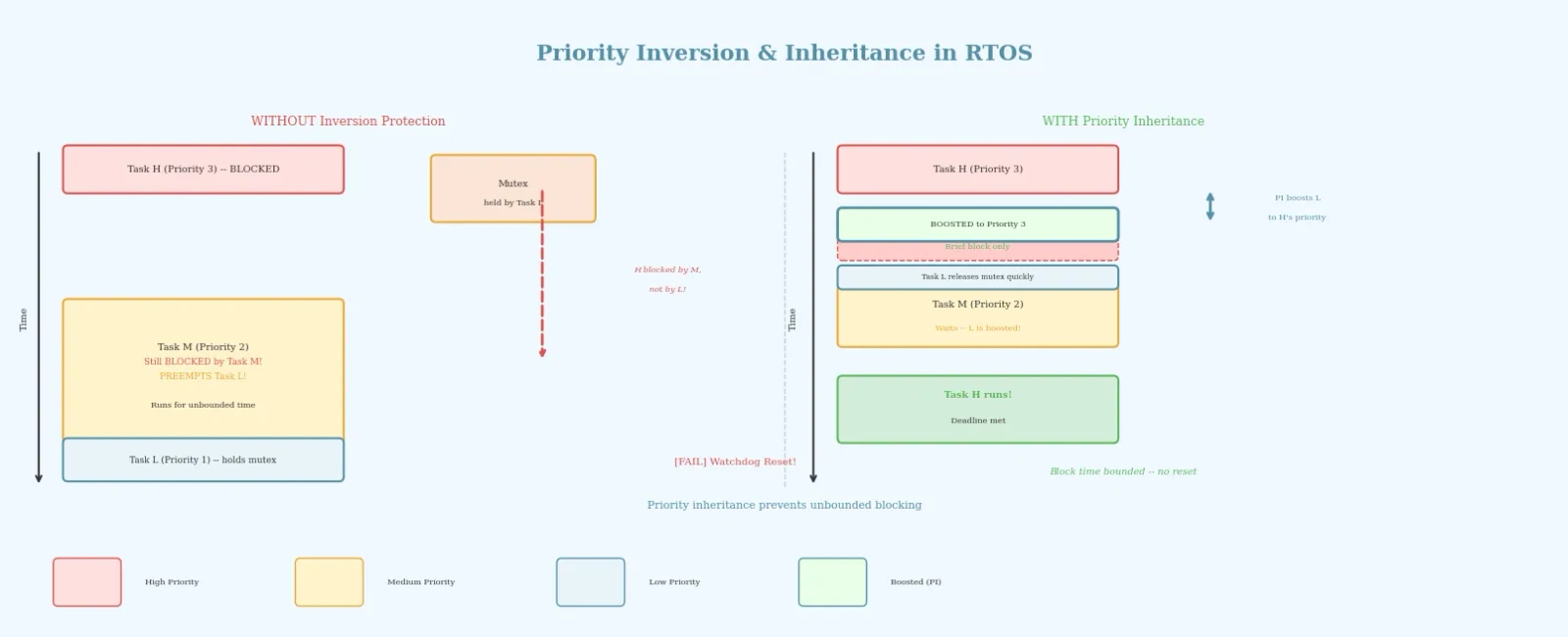
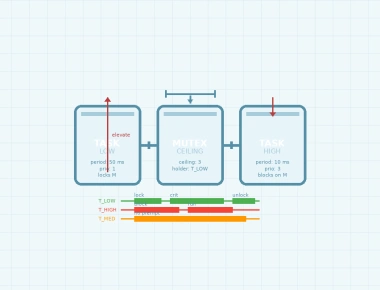
Here is the classic three-task scenario:
Now Task H cannot proceed until Task L releases the mutex, but Task L cannot run because Task M is preempting it. Task H — the most important task in the system — is effectively waiting behind Task M, a task that has no business delaying it. The priority ordering has been inverted.
If Task M runs for a long time, Task H might miss its deadline entirely. In hard real-time systems, this can mean a watchdog timeout, a system reset, or a safety-critical failure.
In July 1997, the Mars Pathfinder lander began experiencing total system resets a few weeks after touchdown. The onboard computer, running Wind River’s VxWorks RTOS, would spontaneously reboot, interrupting science operations and requiring a full recovery cycle.
The Jet Propulsion Laboratory (JPL) engineers reproduced the bug on a ground replica within 18 hours by enabling VxWorks’ system event tracing. The trace data revealed a textbook priority inversion:
When a watchdog timer noticed that the bus management task had not executed on schedule, it triggered a system reset. The fix was straightforward: enable the priority inheritance option on the mutex in question. JPL uploaded the software patch to Pathfinder, and the resets stopped.
Priority inheritance solves the inversion by temporarily raising the priority of the low-priority task holding the mutex. When the high-priority task blocks on the mutex, the RTOS kernel promotes the holder to the same priority as the blocked task. This prevents any medium-priority task from preempting the holder.
The sequence with inheritance enabled looks like this:
The key insight is that priority inheritance does not prevent priority inversion — the high-priority task still waits. It simply bounds the wait time by eliminating the medium-priority task’s ability to interfere.
In FreeRTOS, mutexes (xSemaphoreCreateMutex) automatically implement priority inheritance. The kernel maintains for each task a record of which mutexes it holds and for each mutex a list of blocked tasks ordered by priority. When a high-priority task blocks on a mutex, a function walks the priority inheritance chain — if the boosted task is itself waiting on another mutex, that mutex’s holder is boosted too, propagating up the dependency graph. This chained boosting prevents deadlocks in nested mutex scenarios.
The VxWorks RTOS used on Mars Pathfinder also supports priority inheritance, but it is opt-in per mutex. The mutex created by the select() facility — the one involved in the Pathfinder bug — was created without the SEM_INVERSION_SAFE flag. This is why the fix was a one-line configuration change: enabling the inheritance flag on that particular mutex.
The formal Priority Inheritance Protocol was first described by Sha, Rajkumar, and Lehoczky in their seminal 1990 IEEE paper. They proved that the protocol bounds the blocking time of any task to at most the duration of one critical section per lower-priority task — provided there are no nested locks forming a deadlock cycle.
configUSE_MUTEXES to 1 in FreeRTOSConfig.h. In other RTOS platforms, check that inheritance is active rather than assuming it.Priority inversion is not an academic curiosity — it is a real-world bug that has caused mission-critical system failures in space. Priority inheritance is the standard mitigation, and every embedded engineer working with RTOS-based systems should understand both the problem and the solution. The takeaway is simple: use mutexes for resource protection, enable priority inheritance, keep critical sections brief, and always test for timing edge cases in your real-time design.
Quick Links
Legal Stuff